Introduction
The Division of Advanced Study for Space Exploration (ASSE) is established in March, 2013. Currently, there are 7 members and about 5-10 graduate students in the division. In the upcoming years, we welcome talented young scholars and outstanding students who are willing to devote themselves to space exploration to join ASSE.
ASSE provides advanced study on new concepts for space system, technological supports on dynamics, and control for space systems and space system design.
The mission of ASSE is to conduct multidisciplinary research on space exploration, which is beneficial to continuously understanding the solar system and the universe, protecting our living planet, and encouraging young people to join space exploration. Currently, the research areas in the Lab include trajectory optimization and mission design, precise orbit determination of spacecraft and its scientific applications, and engineering control study for space systems.
ASSE is now undertaking a wide range of research projects from China Manned Space Program, National Natural Science Foundation, National 863 project, and other projects collaborated with National Labs and industry cooperation.
ASSE aims to develop new concepts in multidisciplinary research on space exploration and state-of-the-art technology for space engineering.
Research activities and progress
Since the establishment of ASSE, we have conducted a series of research activities and achieved significant progress.
ASSE’s team on trajectory optimization and mission design participated in the 7th edition of GTOC in 2014 and finally ranked 4th out of 24 teams from the world. GTOC (global trajectory optimization competition) is a prestigious worldwide competition, attracting participations of many scholars from China, USA, Europe, Russia, and other nations.
High precision orbit determination software of satellites
ASSE have already finished the high precision orbit determination software of satellites in low Earth Orbit (LEO). The flow diagram is show in Fig. 1.The objective of this research work is to develop, implement and validate a strategy for high precision absolute and relative positioning of satellites by using dual frequency zero and differenced GPS observations. We designed a flow diagram, as shown in Fig. 1. It included four main steps: kinematic single point position (SPP), dynamical filtering,data editing and precise orbit determination. Among these steps, the most important is the last step. Reduced dynamic batch least squares (LSQ) technique is used for LEO orbit determination by using pseudorange and carrier phase ionosphere-free measurements, which combines the merits of kinematic positioning technique with pure dynamic orbit determination. In order to compensate for any unmodelling or inaccuracy of the employed dynamic model, piece-wise constant accelerations are estimated in consecutive subintervals on the basis of a precise deterministic force model in the batch LSQ method. Particularly, we use two new methods for calculating the sensitive matrix related to empirical accelerations and solving for the inverse of a banded sparse matrix. GRACE-A real flight data has been used to evaluate the positioning performance of the proposed method. Positioning accuracy of less than 5 cm in terms of 3D RMS was achieved. This determination software is up to international advanced level and it will be used in TG spacecraft and China’s space station in the near future.
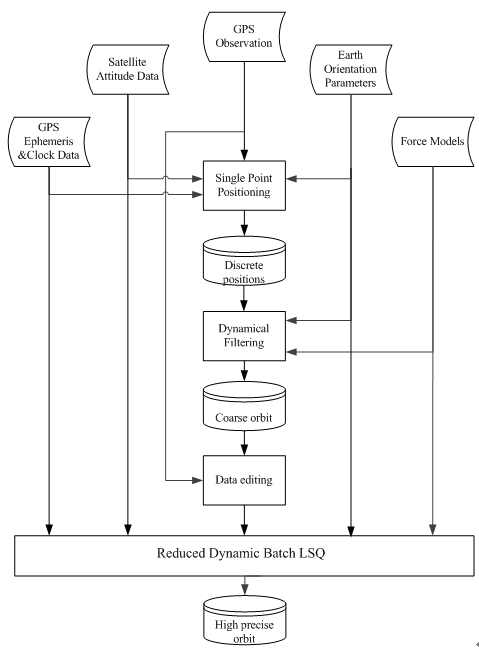
Fig. 1 The flow diagram of POD software
Vibration isolate system
The actual microgravity acceleration level of space station is not low enough for some scientific experiments. A vibration isolate system named Microgravity Active Isolation System (MAIS) is designed to provide better microgravity environment. MAIS consists of a stator and a floater. The stator is fixed on the space station, and the floater is suspended and only linked to the stator by umbilical cables. A modeling and simulation system for MAIS is designed by us.
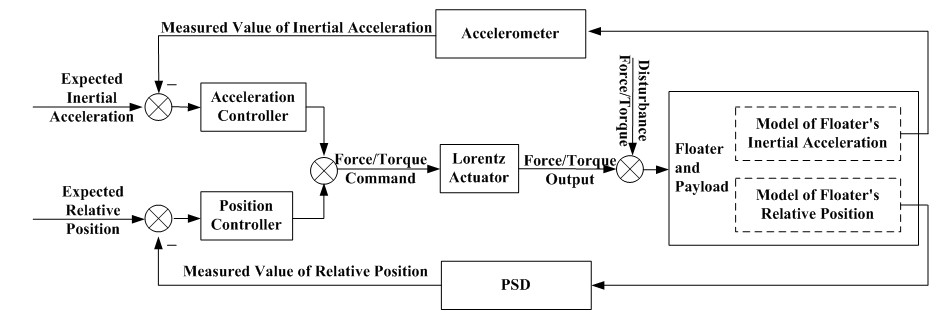
The floater’s position relative to the stator is measured by a set of position-sense-detectors (PSD), and the acceleration is measured by accelerometers. Lorentz actuators are used to generate force and moment to control the motion of the floater so as to isolate the disturbance from the space station. Firstly, the linearized equations of the floater’s motion relative to the stator and the measurement models are established. Subsequently, a feedback control scheme is proposed including two feedback loops. A Proportional-Integrate (PI) controller is designed in the acceleration feedback loop to reduce the floater’s acceleration level, and a Proportional-Integrate-Differentiate (PID) controller in the relative position feedback loop is used to avoid collision between the floater and the stator. The control commands computed by the controller are realized by an optimal assignment of electric current of Lorentz actuators. Based on our modeling of a classical control system, simulations are finally performed considering various uncertainties. The attenuation of the floater’s microgravity relative to the stator’s microgravity is from -5 to -50dB with the frequency of disturbance from 0.1 to 20Hz caused by the stator. In general, this research work would be a useful guideline for designing and constructing an advanced microgravity active vibration isolation platform in the China’s space station.

